データ加工・分析
CANデータ利用した位置情報の補完
CANデータから取得出来る車速を利用して簡易的に位置情報を補完するデータ加工になります。以下が必要になります。
・CANデータ
・マップマッチング処理
・補完したい区間の開始場所・終了場所
・補完したい経路
利用出来るシーンとして、以下の場合に利用出来ると思います。
・GPSの電波の届かない長いトンネル内の速度の変化・位置を知りたい場合
・山間部(谷でGPSが不安定)な場所を走行する場合の速度の変化・位置を知りたい場合
位置補完方法
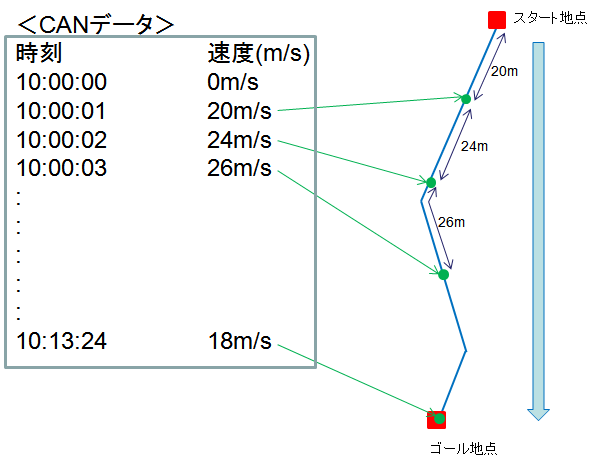
スタート地点から速度×時間=距離分ほど経路上を進めて行き、経過時間と位置を計算していきます。速度×時間を累積した距離と実際の経路で差が出てくるため距離が一致する様に係数を掛けて補正し補完位置とします。
位置補完例
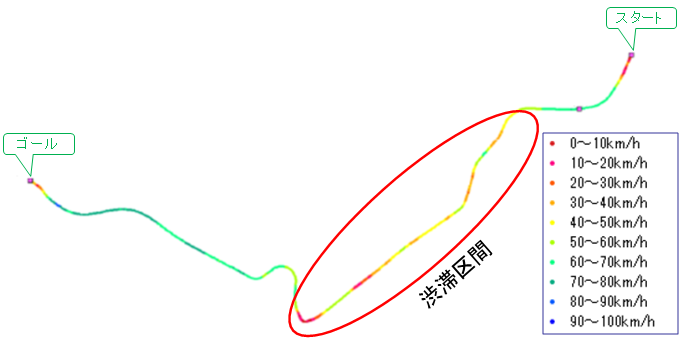
CANデータの速度から位置情報を補完し、速度の分布を表示した例になります。
GPS情報との位置比較
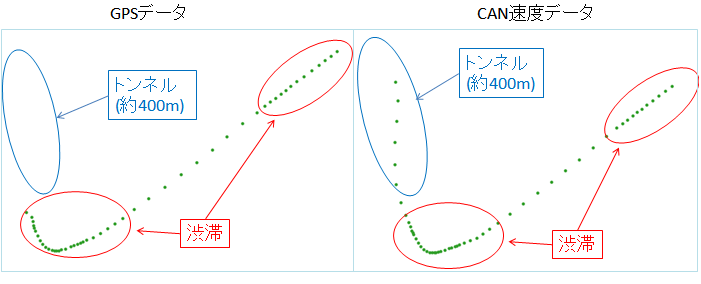
下の図は、GPSを測位しながらCANデータを取得し、取得されたデータを元に比較した図になります。
GPSはトンネル内は取得できなので位置を把握する事は出来ないが、CANの車速から推定する事が出来る事が分かります。CANの車速から位置を推定したものがGPSの位置と同じ様になっているかも確認が出来ます。渋滞している場所などを確認する事も出来ます。
プローブデータの一次加工:マップマッチング
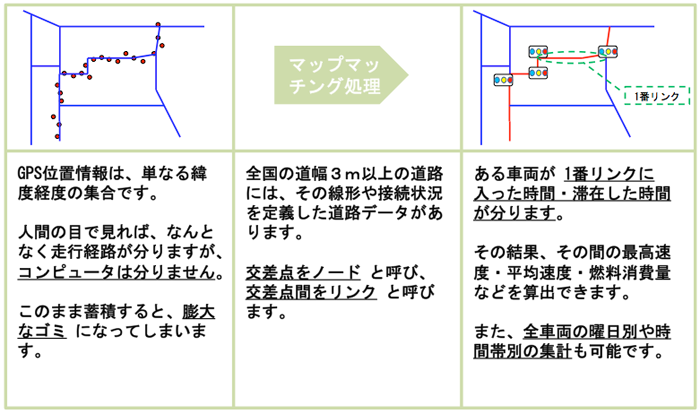
マップマッチングとは、GPS位置情報(緯度・経度・時刻)から実際に移動した経路を特定することです。プローブデータを分析する際に必須の処理です。
・車速パルスやCAN情報は不要です。
・弊社のプローブパーソンシステム、プローブカーシステム、CANプローブシステムから取得したGPS位置情報はもちろん、それら以外で取得した位置情報もマップマッチングできます。
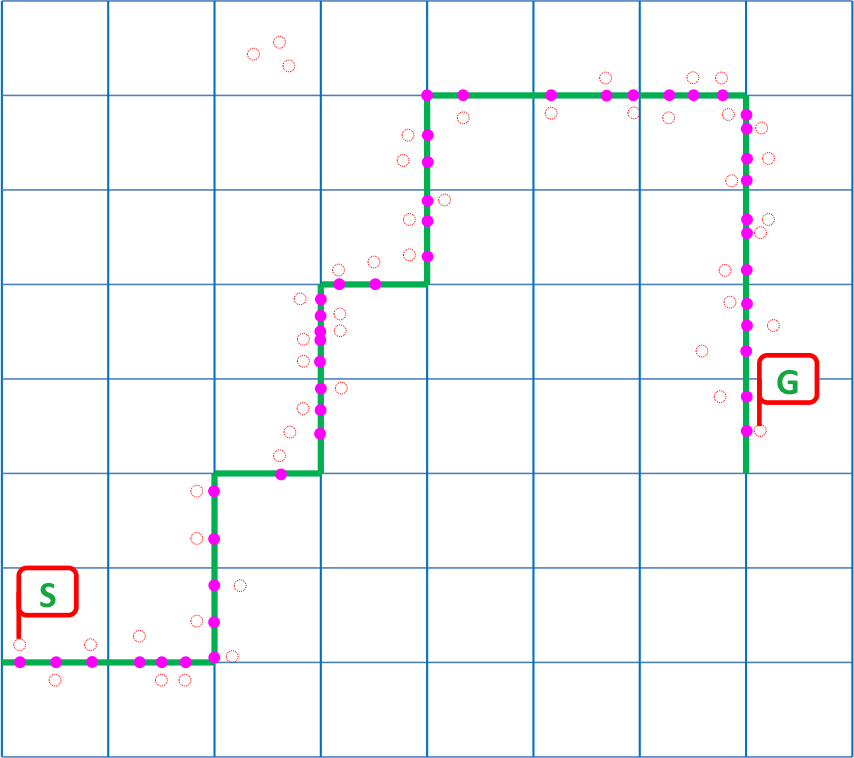
マップマッチング処理手順
- 移動中の GPS データをネットワークデータ*1上に重ねます
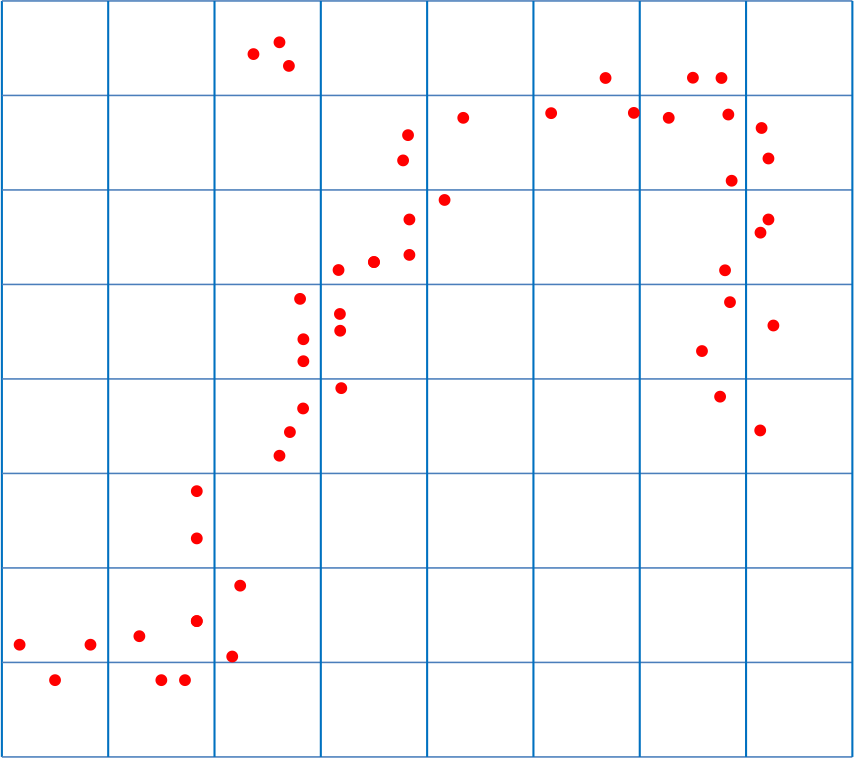
- GPSデータ周辺のリンクを対象ネットワークとして抽出します
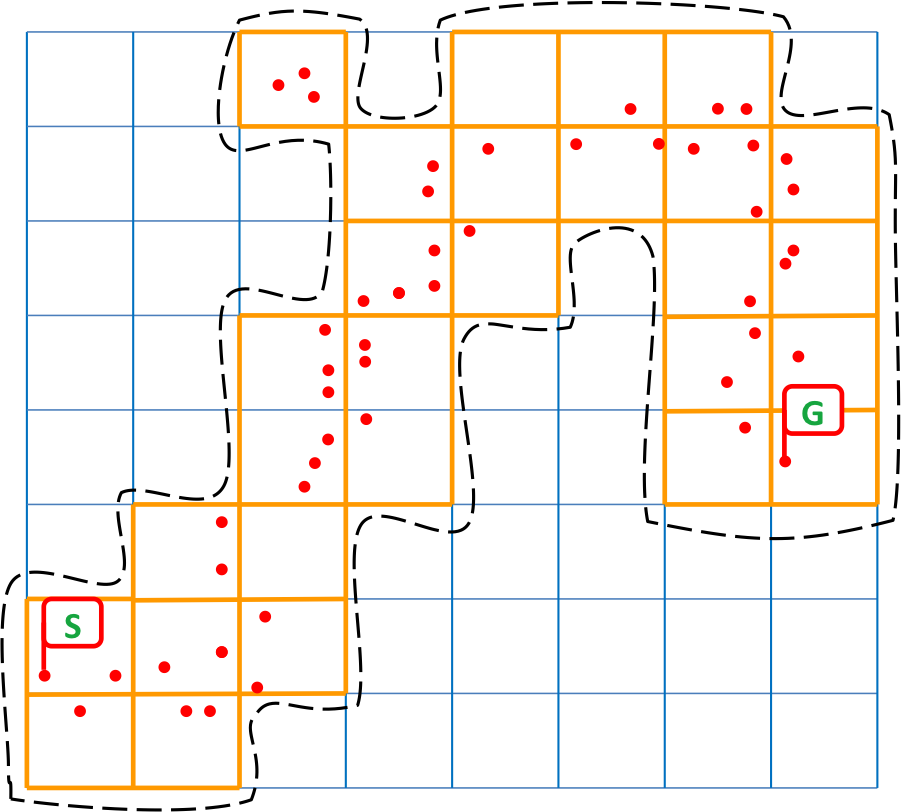
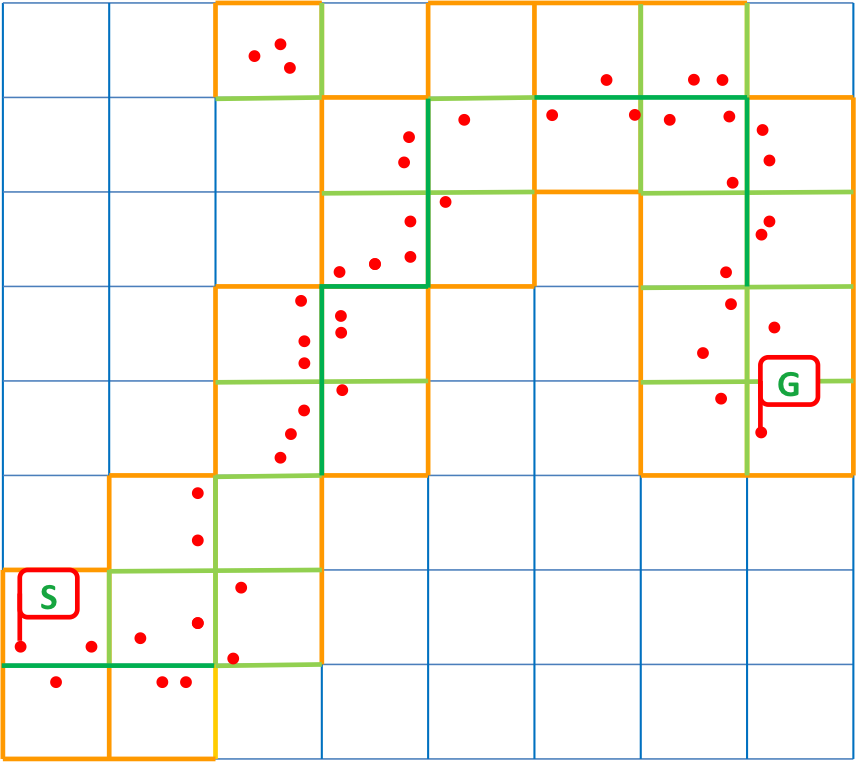
- (2)で抽出したネットワークを対象にリンク別にコストを計算します
コストはGPSデータが近くに多くあるほど小さくなります
橙:コスト大→緑:コスト小
- コストの小さいリンクをスタート地点からゴール地点まで結んで走行経路を特定します
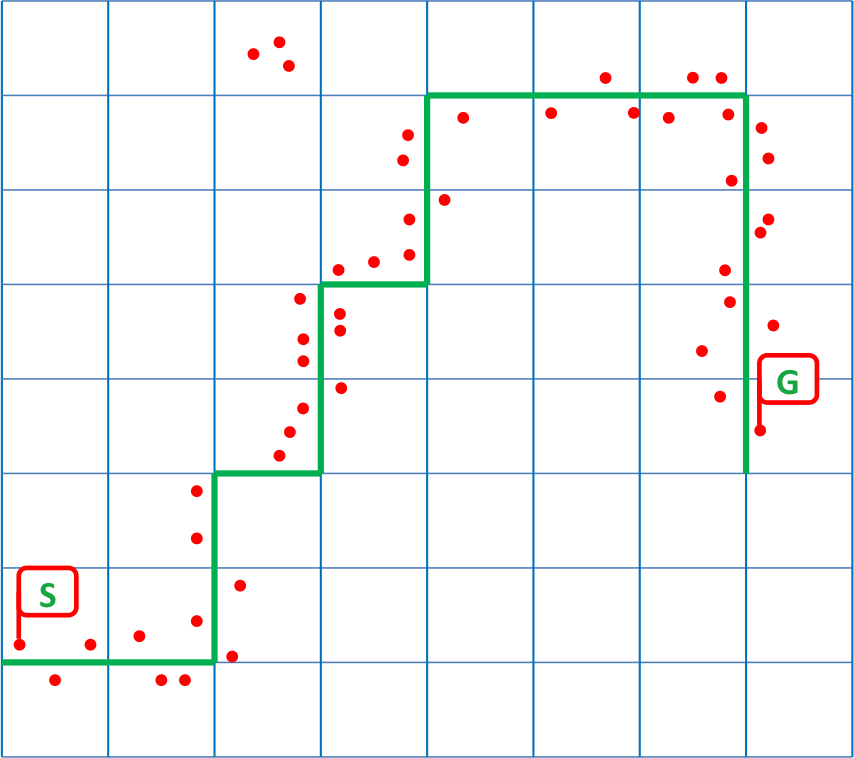
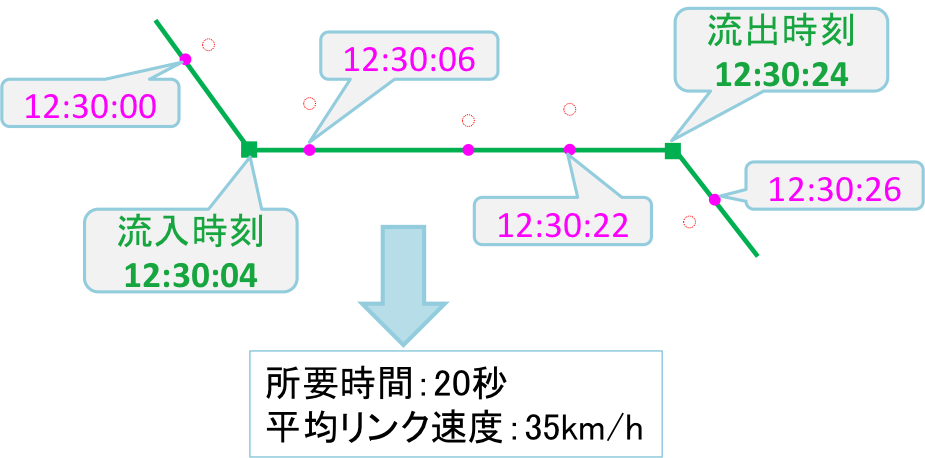
- GPSデータを経路上の位置に補正します
- GPSデータを経路上に補正することにより、リンクの流入、流出時刻が分かり、リンク所要時間やリンク平均速度を算出します
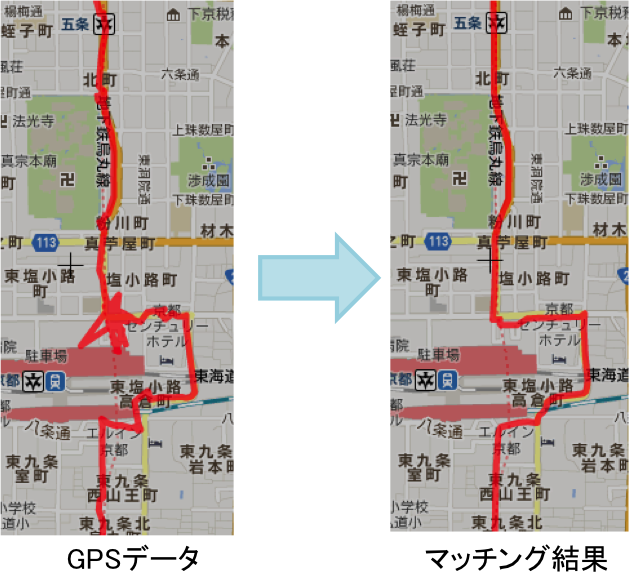
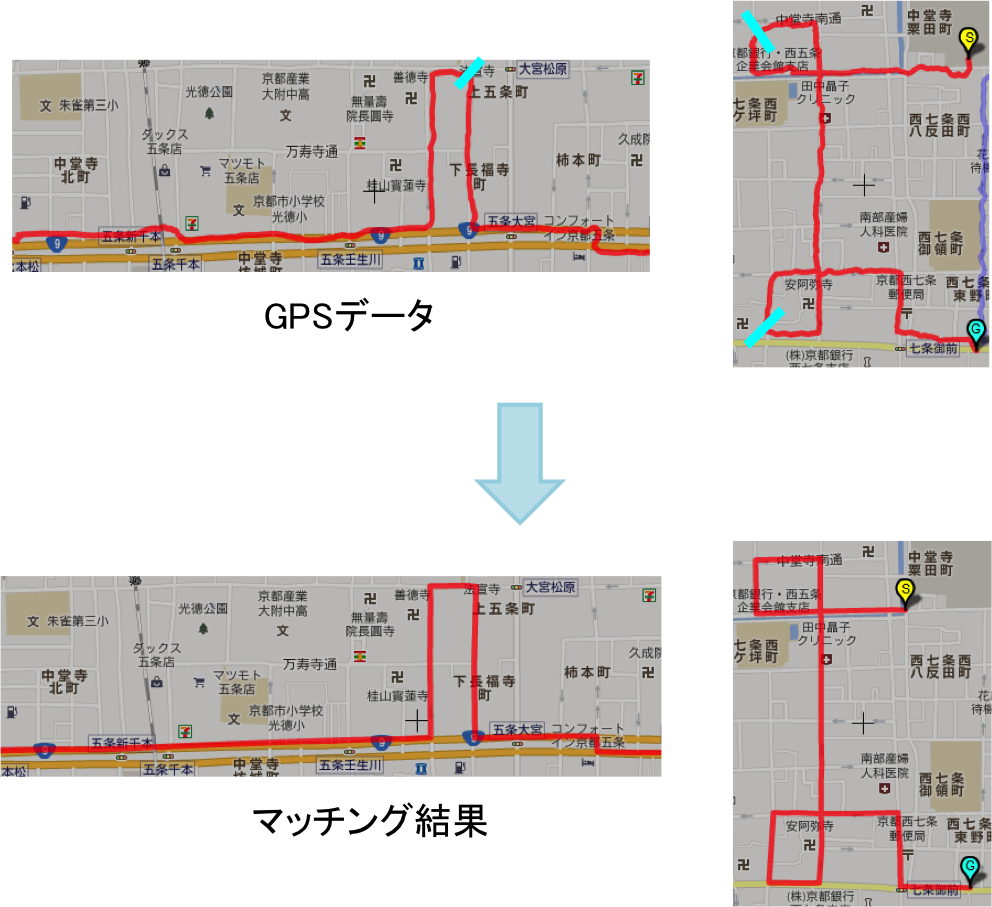
マップマッチング処理例
自動車
徒歩

折返しやループ経路の処理
- 水色の箇所でトリップを分割し処理する事で、折返しやループの経路もマッチングできます
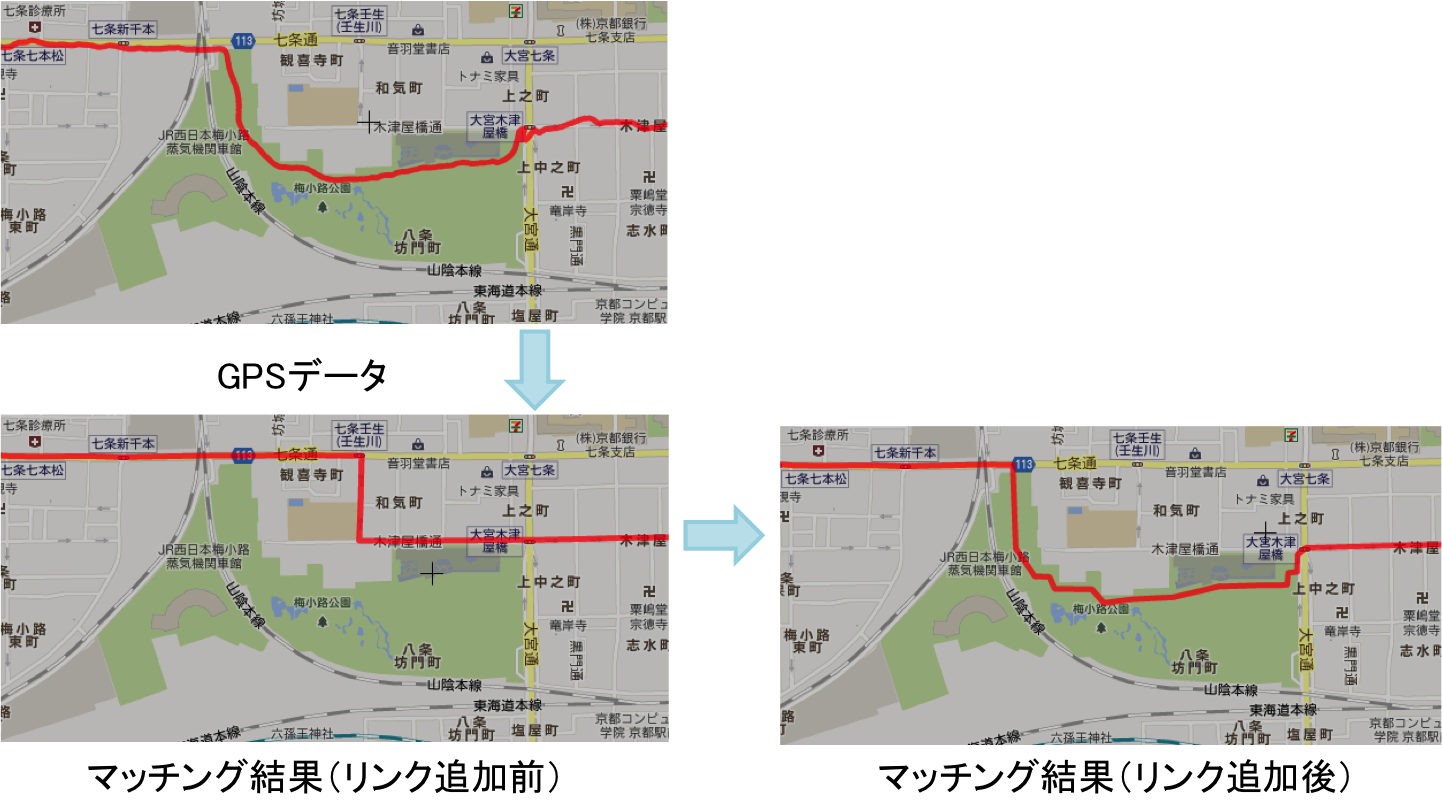
DRMネットワークへのデータ追加(オプション)
- 公園内を自転車で走行したトリップです
公園内にはリンクデータが無いため、周辺の道路にマッチングされています - 公園内にリンクを追加する事で正しくマッチングできます
可視化
測位点データの可視化
エリア内に存在するモニタを10秒毎に表示
- エリアのどこからどこへ、どの経路を通っているなどが俯瞰できます
測位点をメッシュ単位に集計し可視化
エリア内に存在するモニタをメッシュ単位に集計し、存在人数を高さで10秒毎に表示
- 時間帯ごとにエリアのどこに集中しているか把握できます
現在位置表示
リアルタイムに現在位置を表示
- どこを走って現在どこにいるかがわかります

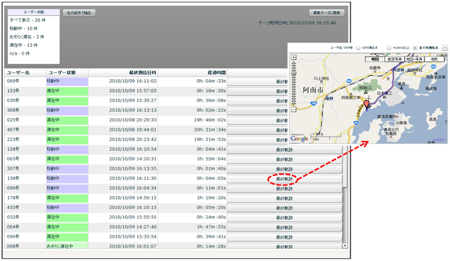
車両状況一覧
現在の車両の状況を表示
- 移動中か滞在中か、最終の移動の状況を把握できます
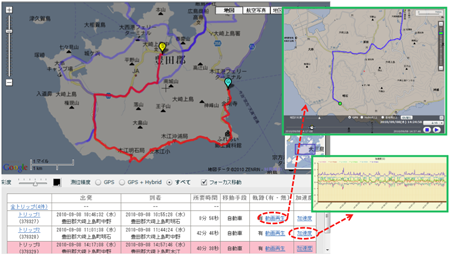
車両別トリップ表示
車両別に走行軌跡を表示
- 移動軌跡、時刻、出発到着住所や、走行状況をアニメーション表示します
ODメッシュ集計
トリップの出発地到着地をメッシュで集計し表示
- 出発地、到着地が集中するエリアを把握できます
- メッシュの大きさは、1km~60mまで選べます
- メッシュをクリックすると、そのメッシュを出発(到着地)とするトリップの軌跡を表示します

メッシュ別トリップをアニメ―ションで表示
あるメッシュを出発地とする複数のトリップ軌跡をアニメーションで表示
- どのような経路でどのエリアへ移動しているかを把握できます
集計・加工して可視化 → オンライン デジタコ
- リンク別、時間帯別の通過速度を表示し、道路の混み具合を可視化

リンクカバー状況
- 車両のリンクカバー状況を表示し、車両の道路網羅性を可視化

車両別走行データ
- 車両別の走行距離や CO2 排出量、区間毎(交差点間など)の走行速度をグラフやリストで表示
